Trong bối cảnh ô nhiễm không khí ngày càng gia tăng, việc giám sát và kiểm soát chất lượng không khí tại các cơ sở y tế, đặc biệt là các phòng khám thú y, trở thành vấn đề cấp thiết. Nhằm nâng cao hiệu quả quản lý môi trường trong các cơ sở thú y, trong khuôn khổ đề tài cấp Học viện: “Nghiên cứu ứng dụng công nghệ IoT để thu thập dữ liệu, đánh giá, phân loại và dự báo trình trạng ô nhiễm khí tại cơ sở phòng khám thú y” do ThS. Lương Minh Quân – Bộ môn Vật lý - Khoa Công nghệ thông tin làm chủ nhiệm đã phát triển thành công hệ thống đo lường và đánh giá mức độ ô nhiễm mùi trong phòng khám. Đây là một bước đột phá trong việc ứng dụng công nghệ mới nhằm bảo vệ sức khỏe cộng đồng cũng như duy trì môi trường sạch sẽ, an toàn.
1. Nghiên cứu cảm biến IoT
1.1. Cảm biến khí MQ (MQ sensor)
Cảm biến khí MQ là dòng cảm biến khí đa năng, nổi bật với khả năng phát hiện nhiều loại khí độc hại và dễ cháy trong không khí như khí CO, NH3, CH4, LPG,... Cảm biến MQ có thể nhận diện các khí ở mức độ rất thấp, mang lại giải pháp hiệu quả cho các ứng dụng như hệ thống cảnh báo rò rỉ khí gas, giám sát chất lượng không khí và các ứng dụng an toàn trong công nghiệp.
    |
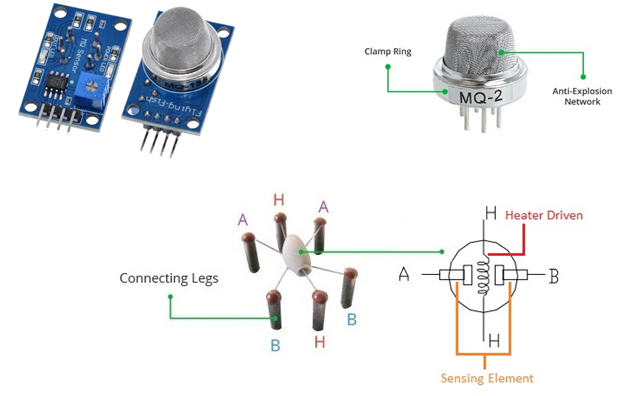 |
| Hình 1. Giới thiệu về dòng cảm biến khí MQ |
1.2. Cảm biến DHT11
Cảm biến DHT11 là một thiết bị điện tử chuyên dụng để đo nhiệt độ và độ ẩm trong không khí. Cảm biến này có thể đo được nhiệt độ trong phạm vi từ 0°C đến 50°C với độ chính xác khoảng ±2°C và đo độ ẩm trong khoảng 20% đến 90% RH (độ ẩm tương đối) với độ chính xác ±5% RH.
DHT11 được sử dụng một cảm biến nhiệt độ và một cảm biến độ ẩm tích hợp trên một con chíp duy nhất, thu thập dữ liệu từ môi trường xung quanh sau đó mã hóa dữ liệu thành một chuỗi tín hiệu số và truyền tải nó qua một chân truyền dữ liệu duy nhất. Dữ liệu này sẽ được giải mã tại đầu nhận dữ liệu (Arduino, ESP32,...) và hiển thị dưới dạng giá trị nhiệt độ và độ ẩm. Với khả năng hoạt động ổn định, kích thước nhỏ gọn dễ dàng thay thế, tiếp cận, DHT11 là sự lựa chọn tốt cho các dự án nghiên cứu môi trường và trong nghiên cứu cơ bản.
1.3. Bộ vi xử lý ESP32
ESP32 là một vi điều khiển tích hợp Wifi và Bluetooth được nghiên cứu và phát triển bởi hãng Espressif System. ESP32 được thiết kế nhiều chân GPIO đa năng cho phép kết nối và giao tiếp với nhiều cảm biến cùng lúc và tích hợp các chân ADC (Analog to Digital Converter) và DAC (Digital to Analog Converter) giúp người dùng dễ dàng chuyển đổi các tín hiệu analog sang tín hiệu số và ngược lại.
2. Xây dựng trạm đo quan trắc chất lượng không khí trong phòng khám Thú y
2.1 Thiết kế trạm đo và kết nối phần cứng.
Trạm đo được xây dựng gồm 3 cảm biến khí MQ, một cảm biến nhiệt độ, độ ẩm DHT11 và một module ESP32 (Hình 2). Các linh kiện này được kết nối với nhau thông qua dây dẫn trên một bảng mạch để đảm bảo tính ổn định và dễ dàng bảo trì thay thế.
|
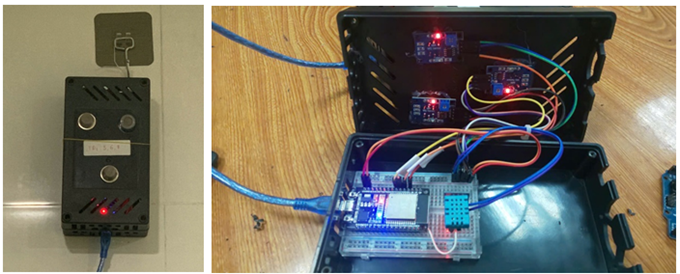 |
| Hình 3. Thiết bị thu thập dữ liệu mùi ô nhiễm |
2.2. Thu dữ liệu và gửi về máy chủ
Module ESP32 trong trạm đo đóng vai trò trung tâm trong việc thu tín hiệu từ các cảm biến. Bên cạnh đó module này còn có nhiệm vụ gửi những tín hiệu thu được đó trực tiếp lên Google Sheet thông qua kết nối wifi.
Dữ liệu thu được từ một trạm đo bao gồm các giá trị đo từ 3 cảm biến MQ và DHT11. Các cảm biến MQ cung cấp thông tin về nồng độ các loại khí đo được dưới dạng giá trị ADC hoặc có thể quy đổi sang giá trị nồng độ ppm. Cảm biến DHT11 cung cấp các giá trị về nhiệt độ (°C) và độ ẩm (%) của môi trường. Dữ liệu sẽ được thu thập theo thời gian thực và được lưu lại dưới dạng bảng bao gồm các cột thời gian, các giá trị về cảm biến MQ và cảm biến DHT11 phục vụ phân tích môi trường nơi đặt trạm đo.
|
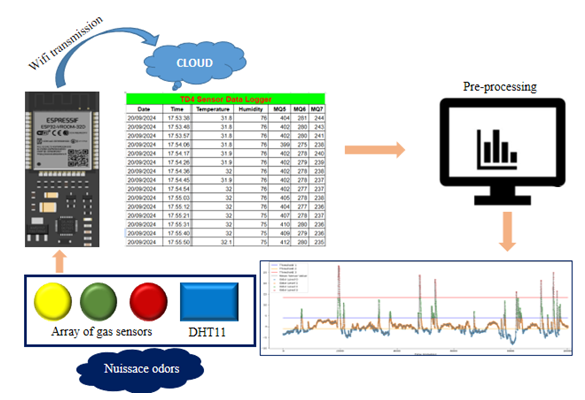 |
| Hình 4. Thiết kế thí nghiệm thu thập dữ liệu |
3. Phân mức ô nhiễm với thuật toán học không giám sát KMEAN
3.1. Ứng dụng Kmean để phân mức dữ liệu ô nhiễm mùi
Dữ liệu đo được từ cảm biến trong quá trình thu thập thường chưa được gắn nhãn để xác định rõ các mức độ ô nhiễm về nồng độ khí. Vì vậy, việc áp dụng thuật toán phân cụm như KMeans là cần thiết để tự động gắn nhãn cho dữ liệu. Cách này giúp hệ thống nhận diện được các mức cảnh báo và hỗ trợ xây dựng hệ thống cảnh báo sớm một cách hiệu quả.
3.2. Khử xu hướng tăng nhiệt với dữ liệu cảm biến
Dữ liệu cảm biến MQ thu thập trong thực tế thường chứa các xu hướng tuyến tính hoặc phi tuyến kéo dài do tác động của môi trường và thời gian. Điều này có thể làm sai lệch kết quả phân cụm nếu không xử lý trước. Trong nghiên cứu này, nhóm sử dụng dữ liệu MQ2 đã được Detrend làm đầu vào cho thuật toán KMeans. Việc loại bỏ xu hướng giúp tăng độ chính xác của phân cụm, đảm bảo các cụm phản ánh đúng mức độ khí thực tế mà không bị ảnh hưởng bởi sự tích lũy của yếu tố thời gian hoặc điều kiện môi trường.
Kết quả phân tích cho thấy giá trị cực đại đạt được tại K = 4, cho thấy việc phân chia dữ liệu thành 4 cụm là tối ưu, đảm bảo các cụm vừa có tính gắn kết nội bộ cao vừa được tách biệt rõ ràng. Giá trị ngưỡng phân mức tương ứng với K = 4 được giới thiệu trong bảng 1.
Bảng 1. Phân mức ô nhiễm không khí trong phòng khám
|
Phân loại mức ô nhiễm
|
Thay đổi theo % của chỉ số cảm biến
|
|
L0 – Mức an toàn
|
L0 ≤ -1,1%
|
|
L1 – Mức trung bình
|
-1,1% < L1 ≤ 3,9%
|
|
L2 – Mức cao
|
3,9% < L2 ≤ 13,5%
|
|
L3 – Mức rất cao
|
L3 > 13,5%
|
|
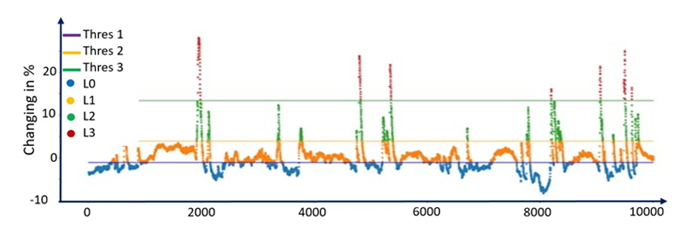 |
| Hình 5. Nhãn ô nhiễm mùi tương ứng với các phân mức từ L0 tới L3 |
Các mức ô nhiễm tương ứng với các hoạt động diễn ra bên trong phòng khám, dựa trên tư vấn của nhân viên làm việc tại cơ sở, bao gồm:
Mức L0 – mức an toàn.
Mức L1 – Mức trung bình: diễn ra trong khoảng thời gian từ giữa đêm tới đầu giờ sang; trước và sau thời gian cho vật nuôi ăn; một số khoảng thời gian trong ngày. Mức này chủ yếu phát sinh từ chất thải vật nuôi tạo mùi hôi, mùi thức ăn, quá trình hô hấp của vật nuôi trong phòng nuôi nhốt, mùi nồng của vật nuôi, mùi thuốc điều trị...
Mức L2 – Mức cao: diễn ra trong khoảng thời gian cho ăn (ca sáng và ca chiều), do sự kết hợp giữa mùi thức ăn và quá trình hô hấp mạnh của vật nuôi.
Mức L3 – Mức rất cao: Xuất hiện chủ yếu trong khoảng giữa các bữa ăn của vật nuôi.
4. Dự đoán mức độ ô nhiễm với mô hình LSTM
4.1. Giới thiệu mô hình LSTM
LSTM (Long Short-Term-Memory) là một loại mạng noron hồi tiếp được thiết kể để giải quyết những hạn chế của mạng RNN khi xử lý chuỗi dữ liệu thời gian. Mô hình LSTM có khả năng học và ghi nhớ các phụ thuộc trong chuỗi dữ liệu. Nhờ cơ chế lưu trữ trạng thái và điều khiển thông tin qua các cổng, LSTM có thể nhận diện và dự đoán các mẫu trong chuỗi một cách hiệu quả, phù hợp cho các bài toán xử lý chuỗi thời gian.
Việc sử dụng LSTM cho dữ liệu cảm biến MQ giúp dự đoán mức độ mùi ô nhiễm trong tương lai gần, cung cấp cơ sở hệ thống cảnh báo sớm hoặc điều chỉnh hệ thống giám sát môi trường. Dữ liệu thu được từ cảm biến MQ là một dạng chuỗi thời gian liên tục.
4.2. Cấu trúc của LSTM
Mỗi đơn vị LSTM có 3 cổng chính:
· Cổng quên (Forget gate): Xác định thông tin nào cần loại bỏ khỏi trạng thái bộ nhớ.
· Cổng nhập (Input gate): Xác định thông tin nào cần được thêm vào trạng thái bộ nhớ.
· Cổng đầu ra (Output gate): Xác định thông tin nào sẽ được xuất hiện ra tại thời điểm hiện tại.
Nhờ vào các cấu trúc này, LSTM có khả năng lưu trữ thông tin trong thời gian dài, học được các xu hướng ngắn hạn và dài hạn trong chuỗi dữ liệu.
4.3. Chuẩn bị dữ liệu đầu vào
LSTM là mô hình học dựa trên lan truyền ngược và tính toán gradient. Nếu dữ liệu đầu vào có dải giá trị khác nhau mô hình sẽ khó học và rơi và trạng thái mất cân bằng, dẫn đến tốc độ hội tụ chậm hoặc kém ổn định. Các đặc trưng khác được giữ nguyên nhằm giữ lại ngữ cảnh thời gian chuỗi.
· Window size: 24 bước-tương ứng với 2 giờ đo liên tục.
· Offset dự đoán: mô hình dự đoán mức độ ô nhiễm khí tại thời điểm 5 phút sau.
Hình 7. Mô hình dự báo với LSTM
Bảng 2. Tham số mô hình LSTM
|
LSTM
|
Optimizer = ‘rmsprop’; loss = ‘mean_squared_error’; epochs=100;
Batch_size=16; dropout=0.2; units=64; return_sequences=True.
|
4.4. Kết quả phân tích với LSTM
Thứ nhất, kết quả dự báo với mô hình học không giám sát với độ đo RMSE và EVS cho thấy cải thiện rõ ràng với dữ liệu đã qua xử lý. EVS – mô tả tỷ lệ phương sai có thể giải thích bởi biến dự báo trong mô hình, cải thiện đáng kể từ 0,77 lên 0,83. Điều này phản ánh khả năng khái quát hóa mô hình tốt hơn.
Bảng 3. Kết quả phân tích với dữ liệu thô và dữ liệu được tiền xử lý
|
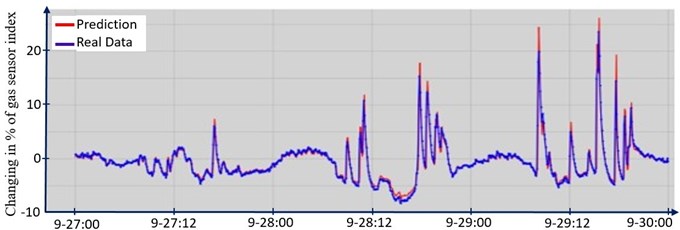 |
| Hình 8. Kết quả dự báo với tập dữ liệu đánh giá |
Thứ hai, mô hình học có giám sát phù hợp hơn với bài toán phân loại mùi hôi. Độ chính xác với tập dữ liệu được tiền xử lý đạt giá trị bằng hoặc cao hơn cho các mức ô nhiễm L0, L3, L1, ngoại trừ với mức L2. Chỉ số Recall cũng cho thấy kết quả tốt hơn với dữ liệu đã được tiền xử lý.
Kết quả dự báo trên hình 8 cho thấy việc sử dụng mô hình LSTM để dự báo mùi hôi trong phòng khám là rất hiệu quả, chuỗi dự báo bát sát chuỗi dữ liệu thực cho thấy khả năng triển khai mô hình vào thực tế để dự báo tình trạng ô nhiễm mùi ở những khoảng thời gian kế tiếp là rất hiệu quả.
Kết luận
Nhóm nghiên cứu đã phát triển thành công hệ thống đo lường và đánh giá mức độ ô nhiễm mùi trong phòng khám. Với công nghệ thu thập, truyền dữ liệu qua wifi, lưu trữ dữ liệu trên GoogleDrive và mô hình dự báo chuỗi thời gian LSTM. Hệ thống có khả năng đưa ra dự báo ở những thời điểm tiếp theo, đưa ra cảnh báo sớm đối với nhân viên quản lý tại phòng khám, kịp thời can thiệp khi có vấn đề về môi trường không khí bên trong phòng khám.
Hệ thống đo và thu thập dữ liệu dễ dàng được triển khai tại các phòng khám, bệnh viện, lớp học, khu xử lý rác thải,… một cách nhanh chóng và hiệu quả với chi phí thấp để thu thập dữ liệu phục vụ cho việc đánh giá và đưa ra giải pháp can thiệp kịp thời.
Trong tương lai gần, nhóm nghiên cứu tiếp tục triển khai mở rộng bài toán nghiên cứu khi kết nối hệ thống đo với hệ thống thông gió, hệ thống phu khử khuẩn tại phòng khám, bộ vi xử lý thông minh với thuật toán AI hỗ trợ.
Khoa CNTT